به گزارش از خبرگزاری آیمد ۳۶۰، تیمی از پزشکان و مهندسان دانشگاه بوستون با نقل از اینترستینگ انجینرینگ، موفق به ابداع یک کاتتر رباتیک با قابلیت تغییر شکل شدهاند. این نوآوری میتواند عملکرد جراحان در محیط حساس و پویا مرتبط با قلب را بهبود بخشد.
پژوهش مذکور که در ژورنال ساینس ادونسز منتشر شده است، نشاندهنده توانایی ربات برای مسیریابی در آناتومی پیچیده و ارائه کمک به فرآیندهای جراحی با استفاده از بافت حیوانی میباشد. پژوهشگران باور دارند که این تحولات میتواند ایمنی و کارآمدی جراحیهای معمول قلب را ارتقا دهد و آنها را کمتهاجمتر نماید.
در حال حاضر، تعداد زیادی از جراحیهای قلب در آمریکا به صورت باز اجرا میشوند و این جراحیها سطح بالایی از کنترل را به جراحان ارائه میدهند، اما با وجود این مزایا، دوره نقاهت معمولاً طولانی است. به همین دلیل برای برخی از بیماران با خطرات زیاد، این گزینه ممکن است مناسب نباشد.
روشهای کمتر تهاجمی شامل عبور کاتترها از طریق عروق بدن به منظور دستیابی به قلب هستند، اما این روشها معایب زیادی دارند. به دلیل اندازه کوچک و عدم چابکی دستی جراح، احتمال جابهجایی این کاتترها به هنگام تپش قلب وجود دارد و دسترسی به بافت مورد نظر نیز چالش برانگیز خواهد بود.
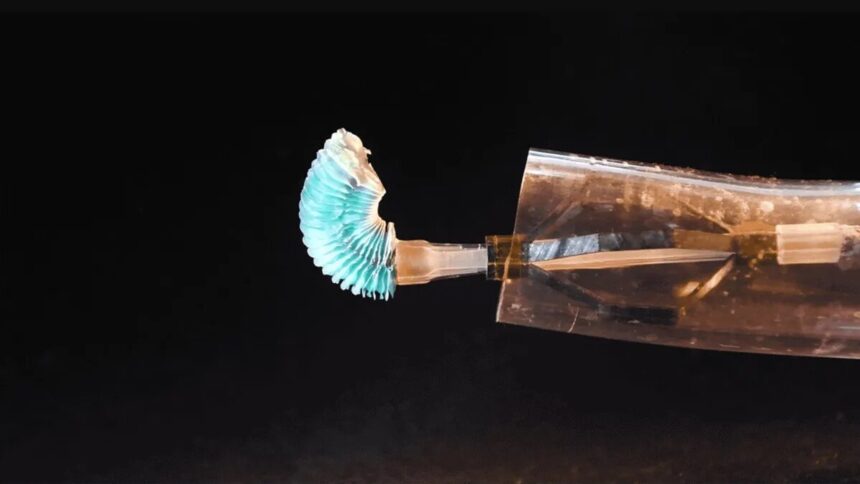
یافتن راهحلی که هماهنگی بین ابعاد کوچک و بزرگ، همچنین سختی و مانورپذیری را داشته باشد، به نظر مشکل میآید. تحقیقگران به رهبری تواسو رانزانی برای حل این چالشها، یک کاتتر رباتیک با ویژگیهای خاص ابداع کردهاند که برای هر مرحله از فرآیند جراحی، سازگار و متناسب است.
نوک کاتتر مذکور، که انعطافپذیری دارد و با استفاده از فشار هوا عمل میکند، به اندازهای باری دارد که در رگها جابهجا میشود. اما هنگامی که به قلب میرسد، برای افزایش ثبات، به صورت متورم میشود. یک حلقه انبساطپذیر باعث ایجاد ثبات بیشتر میشود و کاتتر را با فشردن به سمت دیوارههای رگ در مکان خود ثابت نگه میدارد.
توانایی دوگانه نوک کاتتر و حلقه به این ابزار رباتیک کمک میکند تا بدون انزلاق از موقعیت خود، وارد بافت قلب با تپش شود و به جراحان اجازه دهد تا فرآیندهای حساس را با کنترل و دقت لازم اجرا کنند.
محققان قابلیتهای کاتتر رباتیک را با استفاده از بستر با آناتومی واقعی و انجام آزمایشهای شبیهسازی شده بر روی قلب خوک به نمایش گذاشتند.